
BIOMECANIQUE
Introduction

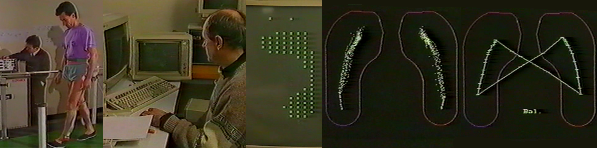
Kinogramme de Marey
|
D'après son objet, la biomécanique est une mécanique appliquée. Ses méthodes de recherche sont
dérivées de celles de la mécanique, mais la biomécanique ne
s'est pas développée au sein de la mécanique : elle est le
produit d'autres disciplines scientifiques telles que
l'anatomie, la physiologie, les sciences du sport telles que
l'on peut les concevoir en STAPS, l'ergonomie...
La biomécanique s'est développée en tant que science limitrophe. Lire aussi : Introduction à la biomécanique |
 Jules-Etienne
Marey
(1830-1904)  (A) Saut en longueur, 1894 |
 (B)
|
Les méthodes de mesure et de traitement des données sont à la base de
tout travail scientifique
Elle comporte les mesures classiques :
Contrairement à la plus part
des méthodes électroniques qui donnent des informations sur les
propriétés mécaniques et les sorties du système musculo-squelettique,
l'EMG représente ou indique l'entrée neurale du muscle. En tant que
paramètre de contrôle, l'EMG est de première importance pour la
modélisation du système neuro-musculo-squelettique dynamique (HATZE,
1981).
Cependant, un point particulier est à prendre en considération : le
signal électrique EMG est un indicateur indirect de la tension ou de la
force musculaire. De nombreux efforts scientifiques ont été consacrés
aux relations quantitatives entre le signal EMG et la sortie mécanique
du muscle. Il apparaît qu'après traitement, l'EMG peut, dans certaines
conditions, être corrélé mais n'est qu'une mesure indirecte de la force
musculaire (SPAEPEN et al., 1987). La situation est encore plus
incertaine pour interpréter l'EMG dans les cas dynamiques.
 Potentiomètres
PotentiomètresUn potentiomètre est une résistance
variable pouvant servir à mesurer des angles. Une partie fixe est liée
au référentiel, une partie mobile est fixée sur un segment dont on veut
déterminer l'angle avec le référentiel.
Les rotations de la partie mobile modifie la tension de sortie du
potentiomètre donnant une information électrique, aisé à traiter,
proportionnelle à l'angle mesuré.
Théorie : La transformation
d'une grandeur physique en information électrique est intéressante en
raison de ses qualités de précision et de fidélité et de la souplesse
d'emploi et de mesure.
Les techniques de fabrication actuelles utilisent les procédés des
circuits imprimés (photographie et attaque du métal), elle permet
d'obtenir des jauges dites pelliculaires très plates avec un support de
20 à 30 microns en résine époxy à partir d'une feuille de métal de 2
microns.
Sous sa forme la plus simple, une jauge est constituée par un fil très fin collé sur une feuille très mince, le fil est disposé comme le montre le schéma suivant, c'est à dire que les brins de fil sont principalement alignés suivant une direction unique D à l'exception des boucles de raccordement entre les brins successifs. Deux fils plus épais servent à souder les sorties à des câbles de liaison aux instruments.
Schéma d'une jauge d'extensométrie
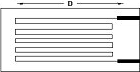
D : la direction principale des fils
électriques
On admet, en première approximation, que le fil subit les mêmes
modifications que la surface sur laquelle elle est collée. La jauge est
donc collée, fils parallèles à la direction dont on désire connaître
l'allongement ou étudier les déformations.
Principes de fonctionnement : La
théorie communément admise est celle qui considère que le fil subit les
mêmes déformations que s'il était tendu par ses extrémités. Un fil fin
que l'on soumet à une traction, dans les limites de son domaine
élastique, s'allonge sous l'effet de la charge, cependant que sa section
diminue. Si l est l'allongement relatif, le diamètre subit une
diminution relative. Sachant que la résistance d'un fil conducteur est :
R = p.l/s
où R : la résistance
(Ohm), p :
la résistivité (Ohm x mètre),
l : la longueur (m), s : la section du fil (m2)
Par exemple, à un étirement de la jauge dans la direction D, correspond une augmentation de l, une diminution de s et donc une variation de la résistance R
δR/R = K . δl/l
K : constante relative
au matériau considéré
La mesure de variation de résistance est donc liée à l'allongement relatif ou déformation longitudinale de la pièce sur laquelle elle est collée. Ce sont les règles de la R.D.M. qui servent à grouper les jauges en vue de la détection d'une composante particulière de la déformation du corps d'épreuve. Un montage particulier (en pont de Wheatstone) permet d'ajouter ou de retrancher entre eux les effets séparés de deux jauges. C'est ainsi que sont éliminés les phénomènes parasites au profit d'une grandeur majorante. La tension de sortie (δV) peut être exploitée directement à l'aide d'un galvanomètre ou autre système d'acquisition.
Généralités : Un capteur est un instrument destiné à transformer une grandeur physique quelconque en une grandeur électrique, en vue d'une mesure ou d'une action sur un dispositif régulateur.
Cette transformation en information électrique est intéressante en raison des qualités (précision, fidélité) et de la souplesse d'emploi des dispositifs électromécaniques ou électroniques. Les applications des capteurs sont très nombreuses : pesée industrielle, mesure ou régulation de pression, forces, couples, puissances, études des vibrations...
Un capteur peut être étalonné directement en lui appliquant une grandeur connue. Les performances les plus élevées peuvent être envisagées sous seule condition de disposer de jauges fidèles, tant par elles-mêmes que par leurs procédés de collage. Il existe une grande variété de capteurs, Leurs principes dérivent des différents phénomènes connus de l'électricité (effets photo-électriques divers, magnéto-électricité, inductance mutuelle, etc...).
Un capteur est constitué par une pièce métallique dite "corps d'épreuve". C'est un dispositif mécanique qui, sous l'influence du phénomène à étudier, subit des déformations. Le corps d'épreuve soumis à la mesurande étudiée en assure donc une première traduction en une grandeur physique (ou mesurande secondaire); c'est celle-ci que la jauge d'extensomètrie traduit en grandeur électrique (G. ASCH, 1982).
Exemple de capteur de force

A et C : les éléments
encastrés respectivement sous le plateau et sur le cadre
B : le corps d'épreuve, D : une jauge d'extensométrie
Une tendance naturelle est d'obtenir de la part du capteur, une
information électrique de grande amplitude, c'est à dire un capteur dont
le corps d'épreuve subit de grandes déformations. Il faut, cependant,
tenir compte des performances recherchées. Des déformations trop
importantes et permanentes risquent d'altérer les performances du
capteur et d'engendrer des déformations plastiques (non linéaires). De
plus, la linéarité du capteur dépendra de la propre linéarité de la
courbe de contrainte du métal.
Le calcul d'un capteur, ou plus précisément de son corps d'épreuve, se
ramène généralement à des cas simples de la résistance des matériaux
(R.D.M.), traction, flexion, torsion de poutres, de membranes. (Certains
métaux sont impropres à la construction de capteurs car sensibles au
fluage : c'est à dire qu'ils se déforment lentement mais progressivement
sous l'action de contraintes continues inférieures à leur limite
élastique).
La limite élastique d'un métal est définie pour un retour au zéro
donné. Généralement, le matériau choisi ne travaille qu'à un cinquième
ou un dixième de sa limite élastique (ex : l'acier dont la limite
élastique est de 100 daN/mm2 ne sera utilisé que jusqu'à 10
daN/mm2). Un capteur peut être étalonné directement en lui
appliquant une grandeur connue. Ces performances les plus élevées ne
peuvent être envisagées que sous la seule condition de disposer de
jauges d'extensométrie fidèles, tant par elles-mêmes que par leurs
procédés de collage.
Principe de fonctionnement : Des
dispositifs mécaniques particuliers peuvent provoquer la déformation du
corps d'épreuve. Ainsi, par exemple, une traction F exercée sur une
barre entraîne une déformation de sa longueur δL/L qui est mesurable par
la variation δR/R de la résistance d'une jauge collée sur la barre.
Connaissant : d'une part l'équation du corps d'épreuve qui lie la
traction, mesurande primaire, à la déformation, mesurande secondaire :
δL/L = 1/E*F/A
F/A : contrainte, A :
section, E : module d'YOUNG
et d'autre part l'équation du capteur liant sa grandeur d'entrée, ici la déformation, à sa réponse électrique δR/R soit :
δR/R = K *δL/L
K : facteur de jauge
Nous pouvons déduire la relation entre traction et variation de résistance :
δR/R = K/E*F/A
Le signal obtenu est donc lié à la grandeur physique recherchée.
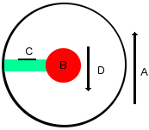
 En
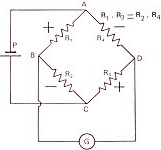
savoir plus : Le circuit de mesure électrique est généralement
constitué par 4 résistances initialement égales R1, R2, R3, R4 montées
en pont de Wheatstone. S'il
est alimenté par une source de courant P, suivant une diagonale, nous
aurons à l'équilibre une tension nulle entre B et D, par raison de
symétrie. La variation de l'une quelconque des résistances fait
apparaître une tension entre B et D qui peut être mesurée par un
galvanomètre G. Pour de très faibles variations de résistances, ce qui
est le cas des jauges, la tension de sortie (δV)
est proportionnelle aux variations relatives de résistance δR/R
de chacune des jauges.
En
savoir plus : Le circuit de mesure électrique est généralement
constitué par 4 résistances initialement égales R1, R2, R3, R4 montées
en pont de Wheatstone. S'il
est alimenté par une source de courant P, suivant une diagonale, nous
aurons à l'équilibre une tension nulle entre B et D, par raison de
symétrie. La variation de l'une quelconque des résistances fait
apparaître une tension entre B et D qui peut être mesurée par un
galvanomètre G. Pour de très faibles variations de résistances, ce qui
est le cas des jauges, la tension de sortie (δV)
est proportionnelle aux variations relatives de résistance δR/R
de chacune des jauges.
Elle vaut :
δV = V/4.(δR1/R1-δR2/R2
+ δR3/R3-δR4/R4)
V : tension de l'alimentation
Les signes alternés ( + ) et (-) de
cette équation caractérisent la propriété fondamentale des ponts, à
savoir que deux résistances opposées agissent dans le même sens, deux
résistances adjacentes travaillent en opposition. D'après la règle des
signes, nous voyons qu'il est possible d'ajouter ou de retrancher
entre eux les effets séparés des jauges afin notamment d'éliminer les
phénomènes parasites au profit d'une grandeur majorante. La tension de
sortie (δV) peut être exploitée de différentes manières : Directement
à l'aide d'un voltmètre ou autre système d'acquisition / Par
comparaison, par méthode d'opposition, à une tension de référence /
Par l'adjonction de résistances auxiliaires en parallèle sur les
jauges, comme indication de déséquilibre pour rétablir la symétrie.
Calcul d'un capteur : Les règles
de la résistance des matériaux (R.D.M.) servent à grouper les jauges en
vue de la détection d'une composante particulière de la déformation du
corps d'épreuve. Le calcul d'un capteur, ou plus précisément de son
corps d'épreuve se ramène généralement à des cas simples de la R.D.M.
(exemples : traction, flexion, torsion de poutres, de plaques ou de
membranes).
Les formules de la R.D.M. s'appliquent à des cas idéalisés. Il ne faut pas trop s'étonner de trouver des résultats qui, bien que du même ordre de grandeur, sont parfois différents de la théorie. Par exemple, une lame fléchie travaille comme une poutre, mais près de son encastrement, elle est considérée comme une plaque. La pièce fondamentale d'un capteur est le corps d'épreuve qui subit les déformations et sur lequel sont collées les jauges. Une tendance naturelle bien justifiée est d'en obtenir une information électrique de grande amplitude donc d'avoir de grandes déformations. Il faut, cependant, tenir compte des performances recherchées.
Des déformations trop importantes et permanentes risquent d'altérer les performances du capteur et engendrer des déformations non linéaires (déformation plastique) du métal qui le compose. Nous savons par exemple que la limite élastique d'un métal ne peut être définie que pour un retour au zéro donné. Nous acceptons couramment en R.D.M., pour limite un retour à 0,2%. Suivant les caractéristiques exigées nous ne devrons "faire travailler" un matériau choisi qu'à 1/5 ou même 1/10 de sa limite élastique : ainsi, un acier dont la limite élastique est de 100 daN/mm2 ne sera utilisé que jusqu'à 10 daN/mm2. De plus, la linéarité du capteur dépendra de la propre linéarité de la courbe de contrainte de déformation du métal. Certains métaux sont impropres à la construction de capteur car sensibles au fluage : c'est à dire qu'ils se déforment lentement mais progressivement sous l'action de contraintes continues même inférieures à leurs limites élastiques.
 Les
accéléromètres reposent tous dans leur fonctionnement sur le principe
fondamental de la dynamique : F=ma (où F : force en N, m : masse en
kg, a : accélération en m.s 2). Fonctionnant selon les
principes de la piézo électricité ou avec des jauges électriques
d'extensométrie (ou jauges de contrainte) il mesure la déformation
provoquée par l'inertie au mouvement d'une masse en déplacement.
Les
accéléromètres reposent tous dans leur fonctionnement sur le principe
fondamental de la dynamique : F=ma (où F : force en N, m : masse en
kg, a : accélération en m.s 2). Fonctionnant selon les
principes de la piézo électricité ou avec des jauges électriques
d'extensométrie (ou jauges de contrainte) il mesure la déformation
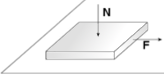
provoquée par l'inertie au mouvement d'une masse en déplacement. Généralités : Les
plate-formes de forces dynamométriques fournissent les 6 composantes : 3
pour les forces (FX, FY, FZ) et 3 pour
les moments de forces (MX, MY et FZ) de
la résultante des forces et moments appliqués sur son plateau supérieur.
Une plate-forme de forces est généralement constituée de deux structures
rigides indéformables reliées par des capteurs de forces. La structure
inférieure encastrée tient lieu de cadre rigide. La surface supérieure
est un plateau qui sert de support aux appuis. Il restitue intégralement
et sans retard les forces aux capteurs, éléments essentiels des
plates-formes de forces.
Plate-forme de forces
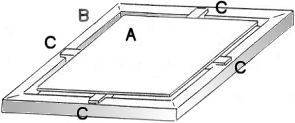
A : le plateau, B : le
cadre, C : les 4 capteurs
En conclusion, connaissant :
Nous pouvons déduire la relation entre les efforts exercés sur le
plateau de la plate-forme et la variation de résistance. Le signal
électrique obtenu est donc proportionnel à la grandeur physique
recherchée. Les capteurs peuvent détecter simultanément plusieurs
paramètres.
Par une disposition judicieuse des jauges de contrainte et des capteurs de forces, les composantes d'une force exercée sur le plateau d'une plate-forme sont mesurées séparément selon les trois axes orthogonaux. Un effort F, appliqué au centre de la plaque, se répartit identiquement sur l'ensemble des capteurs. Un effort décentré provoque des moments autour des axes X, Y et Z. La valeur des forces et des moments est obtenue par des sommations ou des différences de signaux issus par les capteurs.
Le passage du film cinématographique à l'enregistrement vidéo (de env. 20 images/s à des d'obturation très faible l/5000°s) permet d'obtenir des images de meilleure qualité (définition et netteté) pour des coûts bien inférieure (achat et utilisation de la vidéo) et avec une capacité de stockage accrue. Les anciens standards (VHS et Super VHS en demi pouce, UMATIC en trois quarts, et le 8mm) qui limitaient, il y a peut de temps encore, la compatibilité des images sont aujourd'hui supplanté par l'image numérique.
Aujourd'hui, l'utilisation du document enregistré est instantanée. la synchronisation est facile avec les autres sources d'informations numérique, le fonctionnement est discret (utilisation en compétition), enfin les données peuvent être utilisées directement par les systèmes automatiques de dépouillement des données.
 Les
Systèmes Optoélectroniques
(y compris la technique vidéo), fournissent automatiquement
des données spatio-temporelles en 2 ou 3 dimension à partir
des données numériques issues des capteurs optiques
spécifiques ou du traitement des images de caméras ou de vidéo
(exemples : systèmes VICON, ELITE, ...). Les
Systèmes Optoélectroniques
(y compris la technique vidéo), fournissent automatiquement
des données spatio-temporelles en 2 ou 3 dimension à partir
des données numériques issues des capteurs optiques
spécifiques ou du traitement des images de caméras ou de vidéo
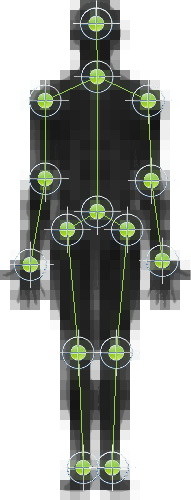
(exemples : systèmes VICON, ELITE, ...).Les systèmes d'analyse de mouvements actuels sont entièrement automatiques, ils traitent en temps réel des images TV et des signaux analogiques, numérique, acquis simultanément. Le matériel est constitué par au minimum 2 (en pratique jusqu'à une dizaine) caméras vidéo synchronisées et travaillant généralement entre 100 et 500 images par seconde. Des marqueurs réfléchissants sont disposés au niveau des points à analyser sur un sujet d'expérience (système Elite). Le dispositif d'analyse reconnaît, pour chaque caméra, les marqueurs qu'il classe selon leur position et le modèle déterminé par l'utilisateur. Un logiciel de traitement établi une relation entre les différents marqueurs des différentes caméras, reconstruit leurs positions successives en 3 dimensions. L'exploitation des données permet d'obtenir en 3D, pour chacun des marqueurs :
|
|
 |
 Prise de vue simple d'un coureur sur tapis roulant
Prise de vue simple d'un coureur sur tapis roulant Positionnement
de marqueurs réfléchissant au niveau des principales
articulations du sujet Positionnement
de marqueurs réfléchissant au niveau des principales
articulations du sujet Construction
de modèles à partir de l'enregistrement puis du traitement de la
position des marqueurs qui reconstituent les différents segments
(aquisition des données par système d'analyse du mouvement en 3D) Construction
de modèles à partir de l'enregistrement puis du traitement de la
position des marqueurs qui reconstituent les différents segments
(aquisition des données par système d'analyse du mouvement en 3D) Visualisation des trajectoires relatives des différentes
articulations, des différents segments
Visualisation des trajectoires relatives des différentes
articulations, des différents segments Exemple de l'analyse de la trajectoire relative du pied : poulaine
(en forme caractéristique de "haricot" fonction du type de course,
du cycle de jambe)
Exemple de l'analyse de la trajectoire relative du pied : poulaine
(en forme caractéristique de "haricot" fonction du type de course,
du cycle de jambe)Glisser
la souris sur les chiffres pour voir l'animation
|

|
On ne dispose pas des plans précis du corps humain, alors même qu'il existe une grande variabilité interindividuelle :
|
 Homme
de Vitruve
De vinci |
Du point de vue du biomécanicien, le corps pourrait se décomposer de la façon suivante :
| Structures
humaines |
Fonctions | Equivalent mécanique |
| Os, squelette | Porter, supporter, donner une forme | Structure, carrosserie |
| Articulations | Déformation de la structure | Axes |
| Tendons | Maintient de la cohésion de la structure | Liaisons mécaniques |
| Muscles | Création du mouvement, stabilisation du corps | Moteurs |
| Structure |
% du poids total | Localisation
de Centre de Gravité |
|
| Tête | 6,9 % | Selle Turcique ou fosse sphénoïdale | |
 |
Cou | 1,9 % | Extrémité inférieure de l'os occipital |
| Tronc | 51,1 % | Face antérieure de L1 | |
| Tête + Cou + Tronc | 59,9 % | Face antérieure de T11 | |
| Bras | 2,7 % | Partie moyenne de l'humérus | |
| Avant-bras | 1,6 % | Au-dessus de la partie moyenne de l'avant-bras | |
| Main | 0,6 % | Partie moyenne du 3ième métacarpien | |
| Membre sup. | 4,9% | ||
| Cuisse | 9,7 % | A la base du 1/3 sup du fémur (bord médial) | |
| Jambe | 4,5 % | A la base du 1/3 sup du tibia (face postérieure) | |
| Pied | 1,4 % | Au niveau post-inf de l'interligne C2 -C3 | |
| Membre inf. | 15,6% | ||
| Corps humain | 100 % | env. = Corps de S2 en position de référence anatomique |
| Elasticité :
soumis à une force, l'os se déforme, puis retrouve sa forme
initiale. On parle d'Hystérésis parfait (il n'existe pas de
déformation résiduelle), mais il peut y avoir fatigue du tissu
osseux, si les sollicitations sont répétées, ce qui entraine un
retour plus long dans le temps. Module d'élasticité de Young (en N/m² ou kg/mm²) est le rapport de la contrainte sur la déformation : (S/F)/(L/ΔL)
égale env. 2000 kg/mm² (par comparaison : acier=20 000, bois=1
000)S : surface, F : force, L : longueur, ΔL : allongement Rappel : plus le module de Young est grand, plus le corps est "raide" (peu élastique) celui de l'os est donc moyen. L'os compact à un module d'élasticité supérieur à l'os spongieux. |
rappel : Loi de Hooke σ = E.ε σ : contrainte appliqueée en N/m2 ou en Pa E : module de Young en N/m2 ou en Pa ε : déformation, sans unité |
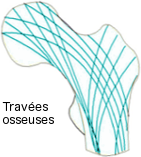 Les
propriétés mécaniques des l'os varient selon la direction (Anisotropie).
L'élasticité des os longs dans le sens longitudinal est 2 fois supérieure
à l'élasticité dans le sens transversal.
Les
propriétés mécaniques des l'os varient selon la direction (Anisotropie).
L'élasticité des os longs dans le sens longitudinal est 2 fois supérieure
à l'élasticité dans le sens transversal.
|
|
 Son
coefficient de frottement (égale force de tension superficielle/force de
compression)= F/N est important (0,01 à 0,003) et permet des glissements
10 à 100 fois supérieur à celui de l'acier sur du nylon.
Son
coefficient de frottement (égale force de tension superficielle/force de
compression)= F/N est important (0,01 à 0,003) et permet des glissements
10 à 100 fois supérieur à celui de l'acier sur du nylon.
| Muscles
du déplacement |
Muscles
de la postures |
|
| Forme | Longs, fins, fusiformes (fibres et muscle ont la même direction, ce qui est favorable au déplacement) | Courts, plats, compacts. Souvent pennés (fibres et direction du muscle n'ont pas la même direction ce qui favorise la puissance par rapport au déplacement) |
| Lieux | dans les extrémités, squelette distal, c'est à dire les membres | Squelette proximal, tronc, gouttière vertébrale (fessiers, abdo) |
| Typologie | Travaillent
dans des leviers Inter Puissants (les plus nombreux) Les leviers
IP privilégient la vitesse et le déplacement à la force. Les fibres musculaires sont plutôt élastiques, peu toniques, fortement et rapidement contractile, mais fatigable |
Travaillent
dans des leviers inter resistant ou inter appuis Les leviers IR privilégient la force à la vitesse et au déplacement. Les fibles sont généralement moins élastiques mais plus toniques. Elles présentent une grande résistance à la fatigue |
| S'entrainent par | Contractions
dynamiques. Efforts maximal à vitesse maximale |
Efforts
sous maximaux mais de longues durées, avec de nombreuses répétitions |
| Cette différenciation
n'est pas pas stricte ; certains muscles peuvent participer de ces
2 catégories ou, selon l'utilisation que l'on en fait, changer de staut (ex. porter longtemps un bébé avec un bras préférentiel). |
||
| Rôle stabilisateur (+) | Rôle moteur (+) | ||
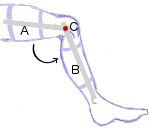
| Par ailleurs, il peut
être utile de différencier le rôle stabilisateur du rôle moteur
d'un muscle, en fonction de son point fixe dans le mouvement. Ainsi dans l'exemple ci-contre, le Brachio-radial (old. huméro-stylo-radial) a un rôle :
|
Point
fixe = Bras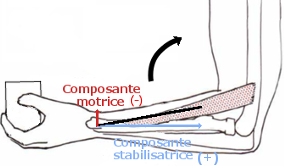 |
Point fixe = Av.-bras
 |
 |
(1) Composante
visqueuse Transfert liquidien du muscle
joue le rôle d'un amortisseur visqueux
(2) Composante contractile Fibres musculaires contractiles
génératricent de forces
(3) Composante élastique passive Tissu conjonctif du corps
musculaire
Pour
en savoir plus : Cf. contenu de cours IRL...
|
Paradoxe de Codman :
Rappel anatomique : en savoir plus...
C'est l'articulation intermédiaire du membre thoracique, il permet de
porter la main à la bouche (cubitus valgus physiologique) sans effort
car l'axe de la trochlée humérale est
orienté de 10° vers le HT et le DH.
| Solutions biologiques : | |
|
 |
L'hyper extension du coude (5 à 10°) correspond plus à une laxité qu'à
un réél mouvement.
Poignet - Rappel anatomique : en savoir
plus...
Il existe des ligaments intra-capsulaires qui unissent les os des
rangées antibrachiale et métacarpiene mais pas entre les 2 rangées. La 1ière
rangée ne reçoit presque pas de muscle et correspond à un "ménisque" de
la 2ième rangée.
Les mouvements dans le poignet sont le fruit de deux articulations :
La Médio-carpienne est limitée en rotation par les ligaments et les
tendons des flechisseurs. Les flechisseurs verouillent la
prono-supination, ce qui constitue un bon compromis entre stabilité et
mobilité. en efet, le poignet augmente sa stabilité dés que muscles de
la loge antérieure de l'avant-bras sont contractés : c'est à dire quand
la main est utilisée.
Il existe un mouvement de flexion associé a l'adduction (ou inclinaison
cubitale) alors que l'extension est liée à une abduction.
Main - Rappel anatomique : en savoir plus...
Les muscles moteurs de la main sont extrinsèques et sont situés dans
l'avant-bras à l'exception des groupes musculaires de l'éminence
thénar et hypothénar
L'axe abduction / adduction est le 3ième doigt.
La main est creuse en face ventrale (arches digitales)
Opposition du pouce à tous les doigts
En flexion : la fermeture des doigts les oriente vers le trapèze
Le pouce n'a que 2 phalanges mais possède une plus grande liberté de
mouvement que les autres doigts. L'amplitude articulaire de ce doigt est
accentuée par la liberté de mouvement de son métacarpe (articulation en
selle entre le trapèze et M1)
La main : outil, multiprise et adaptatif, de la préhension ... en
savoir plus...
Rappel anatomique : en savoir plus...
La hanche s'oppose à l'épaule (stabilité ++ ; mobilité --), latérale
chez la pluspart des mammifères, elle s'est verticalisée chez l'homme.
Elle participe à la marche (20 à 30°).
Angle entre l'épiphyse supérieure et la diaphyse (angle
cervico-diaphysaire) diminue avec âge : passant de 140/145° chez
l'enfant à 125°/130° chez l'adulte, jusqu'à 120° chez le vieillard.
La tête du fémur regarde vers le HAUT et l'AV (15°), l'acetabulum (old.
cotyle) aussi.
Avec le temps, l'usure de cette articulation peut être importante
(risque d'arthrose). Importance du sourcil (ou toit) de l'acétabulum
dans la résistance aux containtes verticales subies par cette
articulation.
Mouvements : l'amplitude dépend de la position du genou (et donc de la
tension des muscles de la cuisse) :
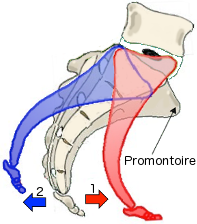
Problématique de l'accouchement : un mobile (le foetus),
des contraintes (le bassin et son col), un mécanisme moteur (les
contractions et efforts expulsifs). |
 |
 Le
poids exerce une contrainte de compression proportionnelle à la charge et
inversement proportionnelle à la section de la surface portante ce qui
explique l'évasement supérieur du tibia (plateau tibial).
Le
poids exerce une contrainte de compression proportionnelle à la charge et
inversement proportionnelle à la section de la surface portante ce qui
explique l'évasement supérieur du tibia (plateau tibial). L'arthrose du genou apparait vers 75 ans
La rotule est le plus gros os sésamoïde du coprs : sa fonction et de
modifier la direction de la traction du quadriceps et d'en limiter
l'usure contre la face antérieure de l'articulation.
Asymétrie plateau tibial (le condyle latérale est plutôt convexe, le
médial est plutôt concave). le condyle latéral est plus long.
Il existe une rotation externe en extension et une rotation interne
lors de la flexion du genou
Genou tendu : le fémur présente une came de grand diamètre, les
ligaments latéraux sont tendus augmentant la stabilité. Pas de rotation
possible de l'articulation mais celle-ci a lieu dans la hanche.
Genou fléhi : le fémur présente une came de petit diamètre, permettant
la rotation (ce deuxième degré de liberté n'apparait que lorsque le
genou est fléchi)
Les ménisques améliorent la congruence de l'articulation, ils sont
attachés à rotule : l'extension les ramène vers AV, la flexion les fait
reculer (Cf. pathologie des carreleurs quand le menisque ne revient pas
assez vite vers l'AV au redressement)
Les ligaments latéraux se croisent :
Mouvement :
L'amplitude de la flexion dépend de la position de la hanche : 120° si
la hanche est en extension, 140° si la hanche est en flexion. La flexion
passive du genou est de 160°
Rappel anatomique : en savoir plus...
Il existe un décallage de hauteur entre les 2 malléoles. La malléole
tibiale est plus haute que celle de la fibula : cela a une incidence sur
le sens de la torsion dans les entorses
de la cheville.
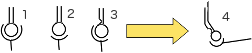
| Les vôutes plantaires sont le premier
amortisseur de corps. Au repos, lors de l'appui, nous reposons sur
3 points. : |
||
|
|
 |
Normal (1) ;
Creux (2) ; Pied bot varus équin (3) ; Pied plat (4) ; Pied bot talus
valgus (5)
Cf. usure chaussure

 Forme du
pied : pied grec (orteils n°II plus grand) est le plus fréquent, pied
égyptien (I plus grand), pied carré.
Forme du
pied : pied grec (orteils n°II plus grand) est le plus fréquent, pied
égyptien (I plus grand), pied carré.|
HT
AV 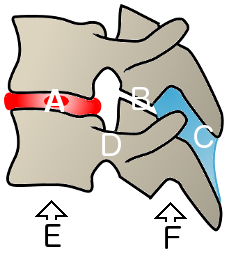
|
Cohérence
fonctionnelle du rachis A : Elément amortisseur passif (DIV)
B : Point d'appui entre processus articulaires supérieur et inférieur de 2 vertèbres successives C : Elément amortisseur actif (musculaire). Ce système de serrage se retrouve aussi en avant du corps de la vertèbre D : Les pédicules séparent les vertèbres en 2 piliers : E : le pilier antérieur qui
supporte le poids du corps
F : le pilier postérieur qui
joue un rôle dynamique (muscles inter-épineux)
|
On dit d'un objet qui change de position en fonction du temps qu'il a
une vitesse.
Vitesse moyenne :
Vmoy = (xf-xi)
/ (tf-ti) = δ(x) / δ(t)
xf
: position finale ; xi : position initiale ; tf
: temps final, ti : temps initial
Vitesse instantannée : limite de la vitesse moyenne lorsque δt tend vers 0 (en m/s)
On dit qu'un objet dont la vitesse varie avec le temps qu'il possède
une accélération. s'il elle est positive, l'objet accélère, si elle est
négative l'objet freine.
Accélération moyenne :
amoy = (vf-vi)
/ (tf-ti) = δ(v) / δ(t)
vf
: vitesse finale ; vi : vitesse
initiale ; tf
: temps final, ti : temps initial
accélération instantanée : limite de l'accélération moyenne lorsque δt tend vers 0 (en m/s2)
| Rappel F = vecteur caractérisé par :
(fig. A) même sens, même direction : l'intensité des forces
s'ajoutent |
fig. A |
fig. C Décomposition d'une force Cf trigo |
fig. B |
| 1ière
loi de Newton |
2ième
loi de Newton |
3ième
loi de Newton |
| Un
corps reste immobile ou conserve un mouvement rectiligne uniforme
aussi longtemps qu'aucune force extérieure ne vient modifier son
état (loi d'inertie). Inertie : Propriété d'une masse qui présente une résistance, à l'accélération ou à la décélération, appliqué par des forces externes - Un solide ne se met pas spontanément en mouvement - Un solide en mouvement ne s'arrête pas de lui-même, il tend à conserver indéfiniment la direction et la vitesse de son mouvement rectiligne et uniforme (sur terre, des forces de frottements ralentissent puis arrêtent les mouvements) |
L'accélération (a) d'un objet
est directement proportionnelle à la force exercée sur lui (F) et
inversement proportionnelle à la masse de celui-ci (m) La direction de l'accélération correspond au sens dans lequel la force s'exerce. a=F/m =>
F=m.a |
Chaque fois qu'un objet exerce une force sur un second objet, celui-ci exerce en retour une force égale mais opposée. A chaque action correspond une réaction égale intensité, mais de sens opposé. |

Un levier est une barre rigide, mobile autour d'un point fixe (point d'appui, axe de rotation) et soumis à 2 forces qui tendent à le faire tourner en sens opposé.


On peut choisir arbitrairement un sens de rotation positif : une force aura une action positive, l'autre aura une action négative, ces 2 actions peuvent s'annuler créant ainsi un équilibre.
On note généralement :
Force : La force appliquée à un
corps est ce qui modifie ou tend à modifier l'état de ce corps. Une
force peut tendre à accélérer, freiner la vitesse d'un corps, changer sa
direction ou le déformer. Un force est caractérisée par un vecteur lui
même caractérisé par son intensité, sa direction et son sens. Unité : N
(le Newton), 1N permet de déplacer une masse de 1kg par m/s2
Intensité d'une force : c'est
l'action plus ou moins grande avec laquelle elle agit (la force
musculaire humaine est en rapport avec le nombre et l'épaisseur des
faisceaux qui se contractent - Cf.
Section physiologique).
Bras de levier : c'est la
distance (d) qui correspond à la perpendiculaire abaissée de l'axe de
rotation sur la droite de direction de F (soit, la distance entre
axe de rotation et droite support du vecteur force, comptée
perpendiculairement à la direction de cette force).
Unité : le m (mètre)
| Bras de levier d |
 |
 |
Bras de levier d=d'.sinα |
 sinα
= côté opposé/hypoténuse
sinα
= côté opposé/hypoténuse| α | 0° | 30° | 45° | 60° | 90° |
| cosα | √4/2 =1 |
√3/2 | √2/2 | √1/2 =1/2 |
√0/2 =0 |
| sinα | √0/2 =0 |
√1/2 =1/2 |
√2/2 | √3/2 | √4/2 =1 |
avec √2=1.414 et √3=1.732
Moment de force (MF) : C'est le produit de l'intensité de la force par son bras de levier. Il rend compte de "l'efficacité" de la force en rotation. Plus le bras de levier est long, plus la force nécessaire pour permettre une rotation sera faible.
|
|
| MF=F.d car sin90°=1 |
MF=F.d ou MF=F.d'.sinα |
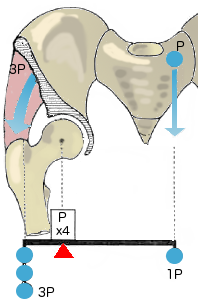
| Levier
Inter-appuis (ou levier du 1° genre) |
Levier Inter-résistant (ou levier du 2° genre) |
Levier
Inter-puissant (ou levier du 3° genre) |
|
| Description |
L'axe ou le point d'appui (A)
se situe entre les points d'application des forces P et R
|
R se situe entre P et A
Leviers rares dans le corps humain bien qu'ils favorisent la puissance musculaire |
P se situe entre R et A
Ceux sont les leviers les plus nombreux (fréquents) dans l'appareil locomoteur. |
| Exemples physiques | |
 |
 |
| Exemples anatomiques |  |
 |
 |
| Exemples mécaniques |  |
 |
 |
|
Avantages/ inconvénients |
Pour
atteindre l'équilibre : l'intensité de P peut être égale à celle de R, si leurs bras de levier sont de mêmes longueurs |
Efficacité de P (++)
en effet, P peut équilibrer R malgré une intensité moindre car son bras de levier est plus grand Amplitude du mouvement provoqué
par P (--)
car loin de l'axe, P n'engendre que peu de déplacement |
Efficacité
de P (--) pour équilibrer R, P doit avoir une intensité supérieure à R car son bras de levier est plus petit Amplitude du mouvement provoqué par P (++) car près de l'axe, P engendre un plus grand déplacement de l'extrémité du segment |
Démonstration
: à l'équilibre

∑M=0
donc MP+MR=0
soit (p.P)+(r.-R)=0
(ici le moment de R est négatif, sens antihoraire)
p.P=r.R
P=(r/p).R
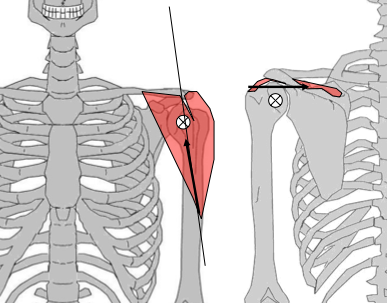
En premier lieu le Deltoïde est un élévateur du moignon de l'épaule, pas de rotation possible car son bras de levier est nul (la direction de la force passe par l'axe de rotation de l'humérus). C'est le supra-épineux qui engage le mouvement de rotation en abduction. Dés que le mouvement est engagé, apparait un bras de levier pour le deltoïde qui peut à son tour provoquer une puissante abduction.
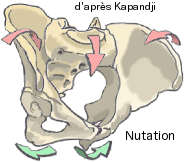 Bassin
Bassin