Biomécanique Instrumentale
Principaux Outils de Mesure
Les méthodes de mesure et de traitement des données sont à la
base de tout travail scientifique
Anthropométrie biomécanique
Elle comporte les mesures classiques :
- Poids, taille, taille assise, pourcentage de graisse (méthode
des plis cutanés), densité, flottabilité...
- Les nouvelles méthodes d'investigation utilisent des méthodes
non-invasives (scanner, IRM...) et permettent d'analyser de minces
tranches de toutes les parties du corps humain et de réaliser, sur
ordinateur, des reconstructions 3D des différentes structures
internes du corps : os, articulations, muscles, ligaments.
En dépit, de quelques limitations, ces nouvelles méthodes permettent
une étude quantitative des dimensions du corps humain, ce qui est la
condition première à la modélisation du corps. La spectro-RMN donne la
densité de différents protons (H, P, Ca, Mg...) à l'intérieur de
l'organisme, il est ainsi possible de voir évoluer en temps réel un pH
ou un métabolisme à l'intérieur d'un muscle et ce sans aucun
prélèvement, cette méthode encore au stade du laboratoire est promise
à un bel avenir, bien que l'analyse en temps réel d'une pratique
physique ne semble aujourd'hui que peu envisageable.
Électromyographie (EMG)
Contrairement à la plus part
des méthodes électroniques qui donnent des informations sur les
propriétés mécaniques et les sorties du système musculo-squelettique,
l'EMG représente ou indique l'entrée neurale du muscle. En tant que
paramètre de contrôle, l'EMG est de première importance pour la
modélisation du système neuro-musculo-squelettique dynamique (HATZE,
1981).
Cependant, un point particulier est à prendre en considération : le
signal électrique EMG est un indicateur indirect de la tension ou de la
force musculaire. De nombreux efforts scientifiques ont été consacrés
aux relations quantitatives entre le signal EMG et la sortie mécanique
du muscle. Il apparaît qu'après traitement, l'EMG peut, dans certaines
conditions, être corrélé mais n'est qu'une mesure indirecte de la force
musculaire (SPAEPEN et al., 1987). La situation est encore plus
incertaine pour interpréter l'EMG dans les cas dynamiques.
Goniomètres
EN CONSTRUCTION
Jauges Électriques d'Extensométrie (ou Jauge de contrainte)
Théorie : La transformation
d'une grandeur physique en information électrique est intéressante en
raison de ses qualités de précision et de fidélité et de la souplesse
d'emploi et de mesure.
Les techniques de fabrication actuelles utilisent les procédés des
circuits imprimés (photographie et attaque du métal), elle permet
d'obtenir des jauges dites pelliculaires très plates avec un support de
20 à 30 microns en résine époxy à partir d'une feuille de métal de 2
microns.
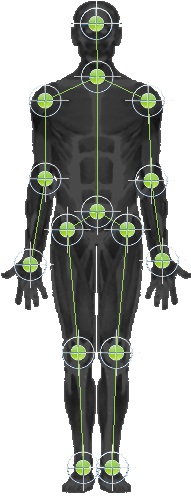
Sous sa forme la plus simple, une jauge est constituée par un fil très
fin collé sur une feuille très mince, le fil est disposé comme le montre
le schéma suivant, c'est à dire que les brins de fil sont principalement
alignés suivant une direction unique D à l'exception des boucles de
raccordement entre les brins successifs. Deux fils plus épais servent à
souder les sorties à des câbles de liaison aux instruments.
Schéma d'une jauge d'extensométrie
D : la direction principale des fils
électriques
On admet, en première approximation, que le fil subit les mêmes
modifications que la surface sur laquelle elle est collée. La jauge est
donc collée, fils parallèles à la direction dont on désire connaître
l'allongement ou étudier les déformations.
Principes de fonctionnement : La
théorie communément admise est celle qui considère que le fil subit les
mêmes déformations que s'il était tendu par ses extrémités. Un fil fin
que l'on soumet à une traction, dans les limites de son domaine
élastique, s'allonge sous l'effet de la charge, cependant que sa section
diminue. Si l est l'allongement relatif, le diamètre subit une
diminution relative. Sachant que la résistance d'un fil conducteur est :
R = p.l/s
où R : la résistance
(Ohm), p :
la résistivité (Ohm x mètre),
l : la longueur (m), s : la section du fil (m2)
Par exemple, à un étirement de la jauge dans la direction D, correspond
une augmentation de l, une diminution de s et donc une variation de la
résistance R
δR/R = K . δl/l
K : constante relative
au matériau considéré
La mesure de variation de résistance est donc liée à l'allongement
relatif ou déformation longitudinale de la pièce sur laquelle elle est
collée. Ce sont les règles de la R.D.M. qui servent à grouper les jauges
en vue de la détection d'une composante particulière de la déformation
du corps d'épreuve. Un montage particulier (en pont de Wheatstone)
permet d'ajouter ou de retrancher entre eux les effets séparés de deux
jauges. C'est ainsi que sont éliminés les phénomènes parasites au profit
d'une grandeur majorante. La tension de sortie (δV) peut être exploitée
directement à l'aide d'un galvanomètre ou autre système d'acquisition.
Capteurs de Forces à jauges
Généralités : Un capteur est un
instrument destiné à transformer une grandeur physique quelconque en une
grandeur électrique, en vue d'une mesure ou d'une action sur un
dispositif régulateur.
Cette transformation en information électrique est intéressante en
raison des qualités (précision, fidélité) et de la souplesse d'emploi
des dispositifs électromécaniques ou électroniques. Les applications des
capteurs sont très nombreuses : pesée industrielle, mesure ou régulation
de pression, forces, couples, puissances, études des vibrations...
Un capteur peut être étalonné directement en lui appliquant une
grandeur connue. Les performances les plus élevées peuvent être
envisagées sous seule condition de disposer de jauges fidèles, tant par
elles-mêmes que par leurs procédés de collage. Il existe une grande
variété de capteurs, Leurs principes dérivent des différents phénomènes
connus de l'électricité (effets photo-électriques divers,
magnéto-électricité, inductance mutuelle, etc...).
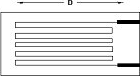
Un capteur est constitué par une pièce métallique dite "corps
d'épreuve". C'est un dispositif mécanique qui, sous l'influence du
phénomène à étudier, subit des déformations. Le corps d'épreuve soumis à
la mesurande étudiée en assure donc une première traduction en une
grandeur physique (ou mesurande secondaire); c'est celle-ci que la jauge
d'extensomètrie traduit en grandeur électrique (G. ASCH, 1982).
Exemple de capteur de force
A et C : les éléments
encastrés respectivement sous le plateau et sur le cadre
B : le corps d'épreuve, D : une jauge d'extensométrie
Une tendance naturelle est d'obtenir de la part du capteur, une
information électrique de grande amplitude, c'est à dire un capteur dont
le corps d'épreuve subit de grandes déformations. Il faut, cependant,
tenir compte des performances recherchées. Des déformations trop
importantes et permanentes risquent d'altérer les performances du
capteur et d'engendrer des déformations plastiques (non linéaires). De
plus, la linéarité du capteur dépendra de la propre linéarité de la
courbe de contrainte du métal.
Le calcul d'un capteur, ou plus précisément de son corps d'épreuve, se
ramène généralement à des cas simples de la résistance des matériaux
(R.D.M.), traction, flexion, torsion de poutres, de membranes. (Certains
métaux sont impropres à la construction de capteurs car sensibles au
fluage : c'est à dire qu'ils se déforment lentement mais progressivement
sous l'action de contraintes continues inférieures à leur limite
élastique).
La limite élastique d'un métal est définie pour un retour au zéro
donné. Généralement, le matériau choisi ne travaille qu'à un cinquième
ou un dixième de sa limite élastique (ex : l'acier dont la limite
élastique est de 100 daN/mm2 ne sera utilisé que jusqu'à 10
daN/mm2). Un capteur peut être étalonné directement en lui
appliquant une grandeur connue. Ces performances les plus élevées ne
peuvent être envisagées que sous la seule condition de disposer de
jauges d'extensométrie fidèles, tant par elles-mêmes que par leurs
procédés de collage.
Principe de fonctionnement : Des
dispositifs mécaniques particuliers peuvent provoquer la déformation du
corps d'épreuve. Ainsi, par exemple, une traction F exercée sur une
barre entraîne une déformation de sa longueur δL/L qui est mesurable par
la variation δR/R de la résistance d'une jauge collée sur la barre.
Connaissant : d'une part l'équation du corps d'épreuve qui lie la
traction, mesurande primaire, à la déformation, mesurande secondaire :
δL/L = 1/E*F/A
F/A : contrainte, A :
section, E : module d'YOUNG
et d'autre part l'équation du capteur liant sa grandeur d'entrée, ici
la déformation, à sa réponse électrique δR/R
soit :
δR/R = K *δL/L
K : facteur de jauge
Nous pouvons déduire la relation entre traction et variation de
résistance :
δR/R = K/E*F/A
Le signal obtenu est donc lié à la grandeur physique recherchée.
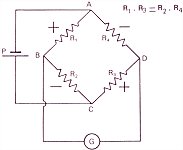 En
savoir plus : Le circuit de mesure électrique est généralement
constitué par 4 résistances initialement égales R1, R2, R3, R4 montées
en pont de Wheatstone. S'il
est alimenté par une source de courant P, suivant une diagonale, nous
aurons à l'équilibre une tension nulle entre B et D, par raison de
symétrie. La variation de l'une quelconque des résistances fait
apparaître une tension entre B et D qui peut être mesurée par un
galvanomètre G. Pour de très faibles variations de résistances, ce qui
est le cas des jauges, la tension de sortie (δV)
est proportionnelle aux variations relatives de résistance δR/R
de chacune des jauges.
En
savoir plus : Le circuit de mesure électrique est généralement
constitué par 4 résistances initialement égales R1, R2, R3, R4 montées
en pont de Wheatstone. S'il
est alimenté par une source de courant P, suivant une diagonale, nous
aurons à l'équilibre une tension nulle entre B et D, par raison de
symétrie. La variation de l'une quelconque des résistances fait
apparaître une tension entre B et D qui peut être mesurée par un
galvanomètre G. Pour de très faibles variations de résistances, ce qui
est le cas des jauges, la tension de sortie (δV)
est proportionnelle aux variations relatives de résistance δR/R
de chacune des jauges.
Elle vaut :
δV = V/4.(δR1/R1-δR2/R2
+ δR3/R3-δR4/R4)
V : tension de l'alimentation
Les signes alternés ( + ) et (-) de
cette équation caractérisent la propriété fondamentale des ponts, à
savoir que deux résistances opposées agissent dans le même sens, deux
résistances adjacentes travaillent en opposition. D'après la règle des
signes, nous voyons qu'il est possible d'ajouter ou de retrancher
entre eux les effets séparés des jauges afin notamment d'éliminer les
phénomènes parasites au profit d'une grandeur majorante. La tension de
sortie (δV) peut être exploitée de différentes manières : Directement
à l'aide d'un voltmètre ou autre système d'acquisition / Par
comparaison, par méthode d'opposition, à une tension de référence /
Par l'adjonction de résistances auxiliaires en parallèle sur les
jauges, comme indication de déséquilibre pour rétablir la symétrie.
Calcul d'un capteur : Les règles
de la résistance des matériaux (R.D.M.) servent à grouper les jauges en
vue de la détection d'une composante particulière de la déformation du
corps d'épreuve. Le calcul d'un capteur, ou plus précisément de son
corps d'épreuve se ramène généralement à des cas simples de la R.D.M.
(exemples : traction, flexion, torsion de poutres, de plaques ou de
membranes).
Les formules de la R.D.M. s'appliquent à des cas idéalisés. Il ne faut
pas trop s'étonner de trouver des résultats qui, bien que du même ordre
de grandeur, sont parfois différents de la théorie. Par exemple, une
lame fléchie travaille comme une poutre, mais près de son encastrement,
elle est considérée comme une plaque. La pièce fondamentale d'un capteur
est le corps d'épreuve qui subit les déformations et sur lequel sont
collées les jauges. Une tendance naturelle bien justifiée est d'en
obtenir une information électrique de grande amplitude donc d'avoir de
grandes déformations. Il faut, cependant, tenir compte des performances
recherchées.
Des déformations trop importantes et permanentes risquent d'altérer les
performances du capteur et engendrer des déformations non linéaires
(déformation plastique) du métal qui le compose. Nous savons par exemple
que la limite élastique d'un métal ne peut être définie que pour un
retour au zéro donné. Nous acceptons couramment en R.D.M., pour limite
un retour à 0,2%. Suivant les caractéristiques exigées nous ne devrons
"faire travailler" un matériau choisi qu'à 1/5 ou même 1/10 de sa limite
élastique : ainsi, un acier dont la limite élastique est de 100 daN/mm2
ne sera utilisé que jusqu'à 10 daN/mm2. De plus, la linéarité
du capteur dépendra de la propre linéarité de la courbe de contrainte de
déformation du métal. Certains métaux sont impropres à la construction
de capteur car sensibles au fluage : c'est à dire qu'ils se déforment
lentement mais progressivement sous l'action de contraintes continues
même inférieures à leurs limites élastiques.
Les systèmes matriciels de mesure des pressions
Les systèmes matriciels de mesure des pressions dans les contacts :
dispositifs constitués d'un nombre important de capteurs de pression
disposés sous forme matricielle (ils sont éventuellement être disposés à
l'intérieur de la chaussure) (Cf. film)
EN CONSTRUCTION...
Accéléromètres
EN CONSTRUCTION...
Plate-Forme de Forces (ou Plate-Forme
Dynamométriques)
Généralités : Les
plate-formes de forces dynamométriques fournissent les 6 composantes : 3
pour les forces (FX, FY, FZ) et 3 pour
les moments de forces (MX, MY et FZ) de
la résultante des forces et moments appliqués sur son plateau supérieur.
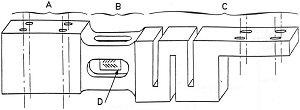
Une plate-forme de forces est généralement constituée de deux structures
rigides indéformables reliées par des capteurs de forces. La structure
inférieure encastrée tient lieu de cadre rigide. La surface supérieure
est un plateau qui sert de support aux appuis. Il restitue intégralement
et sans retard les forces aux capteurs, éléments essentiels des
plates-formes de forces.
Plate-forme de forces
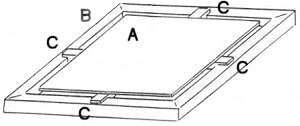
A : le plateau, B : le
cadre, C : les 4 capteurs
En conclusion, connaissant :
- d'une part, la relation qui lie la contrainte sur le plateau de la
plate-forme (mesurande primaire) à la déformation du corps d'épreuve
(mesurande secondaire)
- et d'autre part, l'équation du capteur liant sa grandeur d'entrée,
ici la déformation, à sa réponse électrique
Nous pouvons déduire la relation entre les efforts exercés sur le
plateau de la plate-forme et la variation de résistance. Le signal
électrique obtenu est donc proportionnel à la grandeur physique
recherchée. Les capteurs peuvent détecter simultanément plusieurs
paramètres.
Par une disposition judicieuse des jauges de contrainte et des capteurs
de forces, les composantes d'une force exercée sur le plateau d'une
plate-forme sont mesurées séparément selon les trois axes orthogonaux.
Un effort F, appliqué au centre de la plaque, se répartit identiquement
sur l'ensemble des capteurs. Un effort décentré provoque des moments
autour des axes X, Y et Z. La valeur des forces et des moments est
obtenue par des sommations ou des différences de signaux issus par les
capteurs.
La Prise de Vue
La cinésiologie est l'étude du mouvement (en dehors des causes de
celui-ci) par différents dispositifs comme les appareils photos à prises
rapides ou stroboscopiques, les caméras cinématographiques à vitesse
normale ou élevée, les caméras vidéo aujourd'hui numérique...
Le passage du film cinématographique
à l'enregistrement vidéo (de
env. 20 images/s à des d'obturation très faible l/4000s) permet
d'obtenir des images de meilleure qualité (définition et netteté) pour
des coûts bien inférieure (achat et utilisation de la vidéo) et avec une
capacité de stockage accrue. Les anciens standards (VHS et Super VHS en
demi pouce, UMATIC en trois quarts, et le 8mm) qui limitaient, il y a
peut de temps encore, la compatibilité des images sont aujourd'hui
supplanté par l'image numérique.
Aujourd'hui, l'utilisation du document enregistré est instantanée. la
synchronisation est facile avec les autres sources d'informations
numérique, le fonctionnement est discret (utilisation en compétition),
enfin les données peuvent être utilisées directement par les systèmes
automatiques de dépouillement des données.

Les
Systèmes
Optoélectroniques (y compris la technique vidéo), fournissent
automatiquement des données spatio-temporelles en 2 ou 3 dimension à
partir des données numériques issues des capteurs optiques spécifiques ou
du traitement des images de caméras ou de vidéo (exemples : systèmes
VICON, ELITE, ...).
Les systèmes d'analyse de mouvements actuels sont entièrement
automatiques, ils traitent en temps réel des images TV et des signaux
analogiques, numérique, acquis simultanément. Le matériel est constitué
par au moins 2 (en pratique 3) caméras vidéo synchronisées et
travaillant généralement entre 100 et 500 images par seconde. Des
marqueurs réfléchissants sont disposés au niveau des points à analyser
sur un sujet d'expérience (système Elite). Le dispositif d'analyse
reconnaît, pour chaque caméra, les marqueurs qu'il classe selon
leur position et le modèle déterminé par l'utilisateur. Un logiciel de
traitement établi une relation entre les différents marqueurs des
différentes caméras, reconstruit leurs positions successives en 3
dimensions. L'exploitation des données permet d'obtenir en 3D, pour
chacun des marqueurs :
- les coordonnées
- les vitesses linéaires
- les accélérations
- les déplacements dans les trois plans
- les angles, vitesses et accélérations angulaires entre deux
segments préalablement définis...
Biomécanique Théorique
La modélisation est le noyau théorique de la biomécanique. C'est l'outil
biomécanique le plus puissant.
Il existe différents types de modèles ; leur sélection dépend du but
recherché et de l'information disponible concernant le système original
(KEDZIOR et al., 1987). Dans un but de simplification, deux types de
modèles seulement seront succinctement abordés ici :
- Le modèle empirico-statistique
- Le modèle théorique
Modèle empirico-statistique : Ce
modèle du corps humain et de ses mouvements est utilisé pour identifier et
évaluer les paramètres biomécaniques qui influencent la performance. Basé
sur des données empiriques (mesures cinématiques, cinétiques,
anthropométriques) et utilisant les statistiques, il cherche à déterminer
d'éventuelles relations entre les paramètres choisis et la performance. Un
trait caractéristique de cette approche est la suppression des relations
fonctionnelles entre les variables au bénéfice de seules valeurs
numériques de paramètres, qui sont dans une certaine mesure, sélectionnées
arbitrairement. Ce modèle n'est justifiable que par des applications
pratiques réussies.
Précédemment menée comme une approche "canon", la procédure a été
complètement redéfinie (HAY et REID, 1982) de la manière suivante. Le
modèle est composé de "quantités" mécaniques à différents niveaux, et
arrangé de telle manière que les facteurs d'un niveau déterminent
totalement les facteurs du niveau directement supérieur. Les relations
entre les différents niveaux ou les "quantités" mécaniques ne sont
cependant pas décrites sous forme d'équations algébriques ou
différentielles, mais en bloc-diagramme. Cette caractéristique exprime le
manque de relations quantitatives entre les variables. Ainsi, le modèle ne
peut donner l'assurance que les variables d'entrée sont indépendantes les
unes des autres. On peut donc se poser la question de savoir si le modèle
est déterminant. Gardant ceci à l'esprit, on peut l'utiliser comme
approche pragmatique pour sélectionner des facteurs importants au moyen de
relations statistiques.
Modèle théorique : Ce type de
modèle se base sur les connaissances théoriques des structures et
fonctions mécaniques du corps humain. On peut établir une hiérarchie de
modèles suivant leur niveau de complexité (KEDZIOR et al., 1987) :
- modèle mécanique
- modèle musculo-mécanique
- modèle neuro-musculo-squelettique
Ils peuvent servir de modèle original pour le corps complet ou tout sous
système, prenant en compte les conditions environnementales. Un modèle
très simple est généralement utilisé pour déterminer les moments
articulaires et les forces internes globales au niveau d'une articulation.
Il est évident que le modèle utilisé en raison de l'activité musculaire
incontrôlée des antagonistes et de la non-connaissance de la distribution
des forces entre les muscles bi-articulaires ou les muscles
mono-articulaires peuvent fournir des résultats plus ou moins erronés, et
sans intérêt pour des buts pratiques. Pour surmonter cette faiblesse, des
procédures d'optimisation mathématiques ont été scientifiques ont été
utilisées.
Ces méthodes sont des outils utiles pour l'analyse de systèmes complexes
qui fonctionnent suivant certains principes.
La question fondamentale est : "Quels principes peuvent être choisis comme
fonctions objectives, comme d'optimisation ayant une signification
biologique ?"
EN CONSTRUCTION...
Cinématique
définition
La Cinématique est l'étude du mouvement dans le temps sans se soucier des
causes de ce mouvement. C'est une analyse descriptive et temporelle du
mouvement. Cette description s'énonce en terme de déplacement, de vitesse,
d'accélération, de trajectoire et dépend donc du référentiel choisi. En
STAPS, l'analyse cinématique d'un geste, d'une action motrice, d'un
mouvement, s'effectue le plus souvent, en fonction du référentiel
terrestre (ou Galiléen).
Equations du mouvement dans un espace a une
Dimension
Vitesse (m/s)
On dit d'un objet qui change de position en fonction du temps qu'il a
une vitesse.
Vitesse moyenne :
Vmoy = (xf-xi)
/ (tf-ti) = δ(x) / δ(t)
xf
: position finale ; xi : position initiale ; tf
: temps final, ti : temps initial
Vitesse instantannée : limite de la vitesse moyenne lorsque δt tend
vers 0 (en m/s)
Accélération (m/s2)
On dit qu'un objet dont la vitesse varie avec le temps qu'il possède
une accélération. s'il elle est positive, l'objet accélère, si elle est
négative l'objet freine.
Accélération moyenne :
amoy = (vf-vi)
/ (tf-ti) = δ(v) / δ(t)
vf
: vitesse finale ; vi : vitesse
initiale ; tf
: temps final, ti : temps initial
accélération instantanée : limite de l'accélération moyenne lorsque δt
tend vers 0 (en m/s2)
Dans le cas d'un mouvement uniformément accéléré, le mouvement est dit
uniformément varié : MUV
Dans le cas d'un mouvement à vitesse constante, le mouvement est dit
rectiligne uniforme : MRU
Pour simplifier la notation, on peut supposer que le temps de départ est
nul (temps à l'origine) : t
i = 0 et on note t le temps écoulé
(à la place de t
f)
La position initiale (x
i) et la vitesse initiale (v
i)
seront notés x
0 et v
0. Au moment t, elles sont noté
x et v (à la place de x
f et v
f)
- vmoy=(x-x0)/t => x=x0+vt
- vmoy=(v+v0) =>
- amoy = (v-v0)/t => v=v0+at
x=x0+((v+v0)/2)t
=>x=x0+((v0+at+v0)/2)t =>x=x0+v0t+1/2at2
Cas de la chute libre
v
0=0, x
0=0 et l'accélération est égale à
l'accélération gravitationnelle, g soit (9,81 m/s
2). Les 3
précédentes équations deviennent :
- x=vt
- v=at
- x=1/2gt2
Equations du mouvement dans un espace a 2 ou plusieurs Dimensions -
Vecteurs
En physique, il existe 2 types de grandeurs :
- Les grandeurs scalaires ou valeurs numériques suivi de leur unité :
ex. temps (s), distance (m)...
- Les grandeurs vectorielles qui sont définies par :
- une intensité
- une direction
- un sens
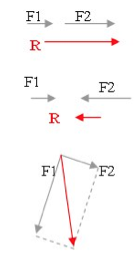
Comment représenter un vecteur ?
Les vecteurs sont représenté par une flèche, avec un point d'application,
une droite d'action ou de support, une direction (celle de la droite de
support), un sens (celui de la flèche) et une intensité (longueur de la
flèche ou plus précisément "grandeur de son module")
Dans un système cartésien, un vecteur V peut être représenté par sa
grandeur (intensité) et l'angle formé avec l'axe des X, ou par ses
composantes V
X et V
Y.
EN CONSTRUCTION
Opération graphique avec des vecteurs
On dit d'un objet qui se déplace en décrivant un cercle à une vitesse
constante v qu'il exécute un mouvement circulaire uniforme
Même si la grandeur de la vitesse demeure constante, sa direction varie
continuellement.
L'accélération étant définie comme le rythme de variation de la
vitesse, une variation de la direction de la vitesse correspond à une
accélération au même titre qu'une variation de sa grandeur.
Ainsi, un objet qui effectue un mouvement circulaire uniforme
accélère. Cette accélération est dirigée vers le centre du cercle On
parle d'accélération radiale ou centripète.
ar = v2 /r









 sinα
= côté opposé/hypoténuse
sinα
= côté opposé/hypoténuse